Humanoids
The foundation for your humanoid development
Motorcortex is deal for Humanoid development. It provides the basic functionality for the large number of servo axes your humanoid has, so you can focus on implementing the humanoid behavior in your robot.
Motorcortex-core gives you:
HIgh-performance and stable Realtime code execution
EtherCAT device such as motor drives and i/o from many manufacturers
Very fast and efficient Middleware to communicate to other services
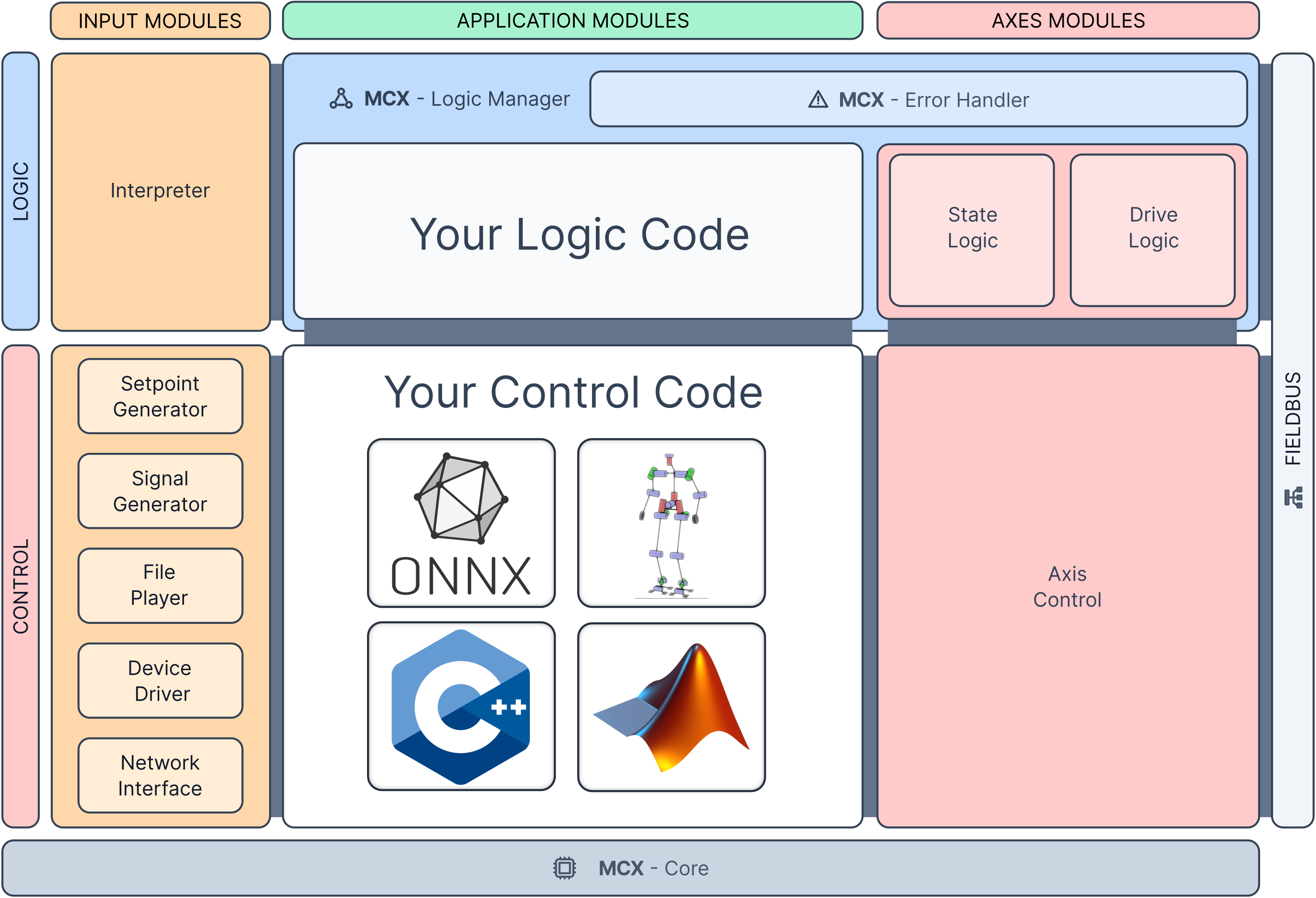
You can start with the Motorcortex-Robot App with a Machine module that can control a virtually unlimited number of Servo Drives and Axes. Motorcortex allows the drives to be controlled in Torque, Velocity and/or Position mode and also provides functionality like axis homing, compliance (impedance and admittance control), smooth switching and fading between signals, sensor monitoring and error handling. A lot of features you as a Humanoid developer do not want to waste time on.
Run Motorcortex on your platform
Motorcortex also offers a maintained Realtime Linux System (Motorcortex-RTOS), which is tuned to be very robust and high performance, even on low-cost hardware. Motorcortex supports ARM and x86 architectures and also offers the service to certify your hardware for deterministic realtime performance.
For ultimate freedom ther is a Motorcortex template project for humanoid robot development. It supports Matlab/Simulink-Embedded Coder, as well as ONNX inferencing. And it is very easy to wrap your our own C++ code into a Motorcortex Module so you can use all Motorcortex tools like the GRID UI builder.